授業用資料
授業で使用できるパワーポイントの資料をダウンロードできます。
ご活用ください。
小学生向け(Scratch)
(外部サイトに移動します。)
こちらサイトで解答コードをダウンロードすることができます。
ScratchがインストールされているPCでサイトを開いてください。
ScratchがインストールされているPCでサイトを開いてください。
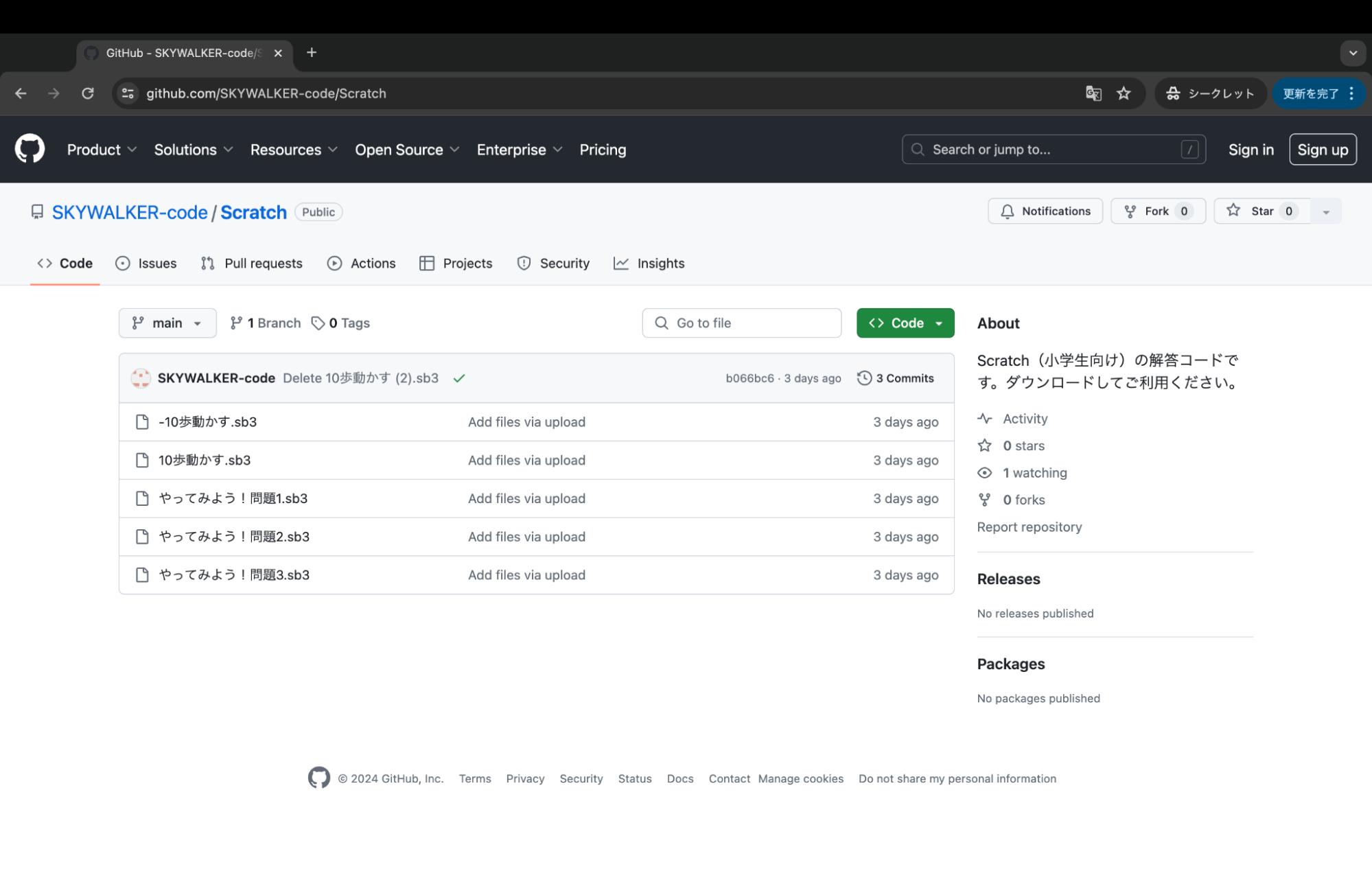
ダウンロードしたい解答コードのページにいきます。
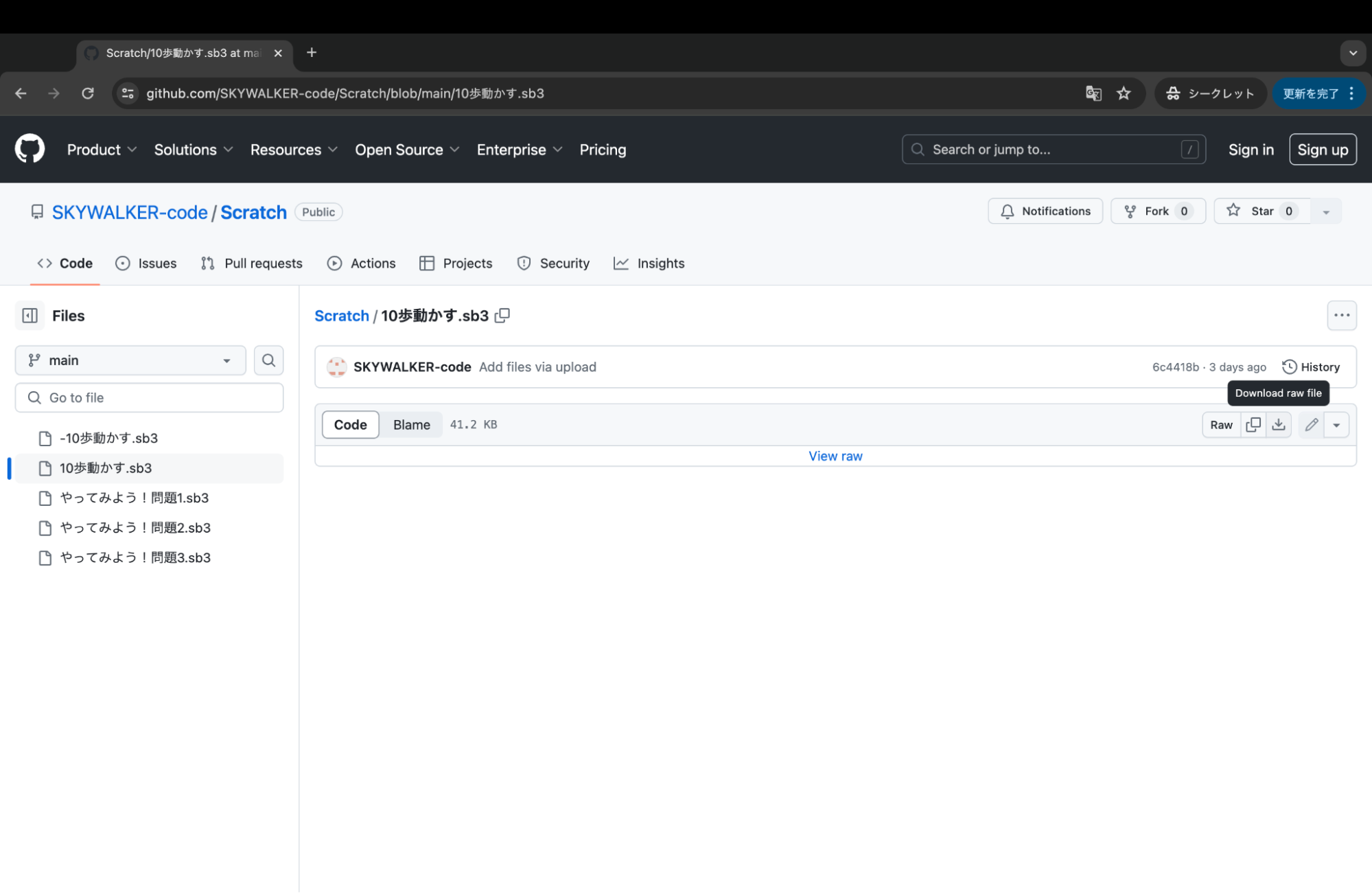
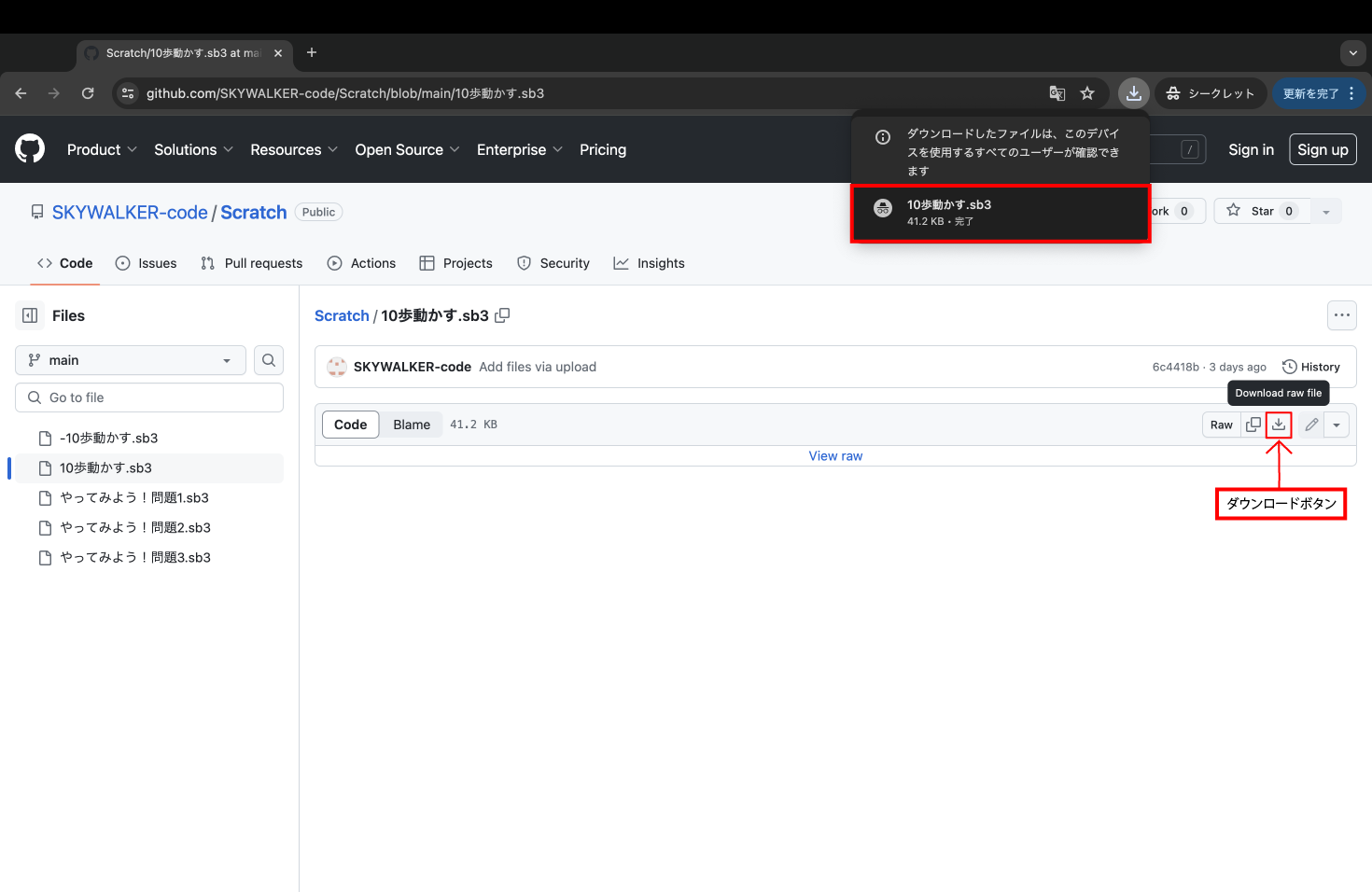
ダウンロードボタンがあるのでそれを押すとダウンロードが開始され、お使いのPCにダウンロードされます。
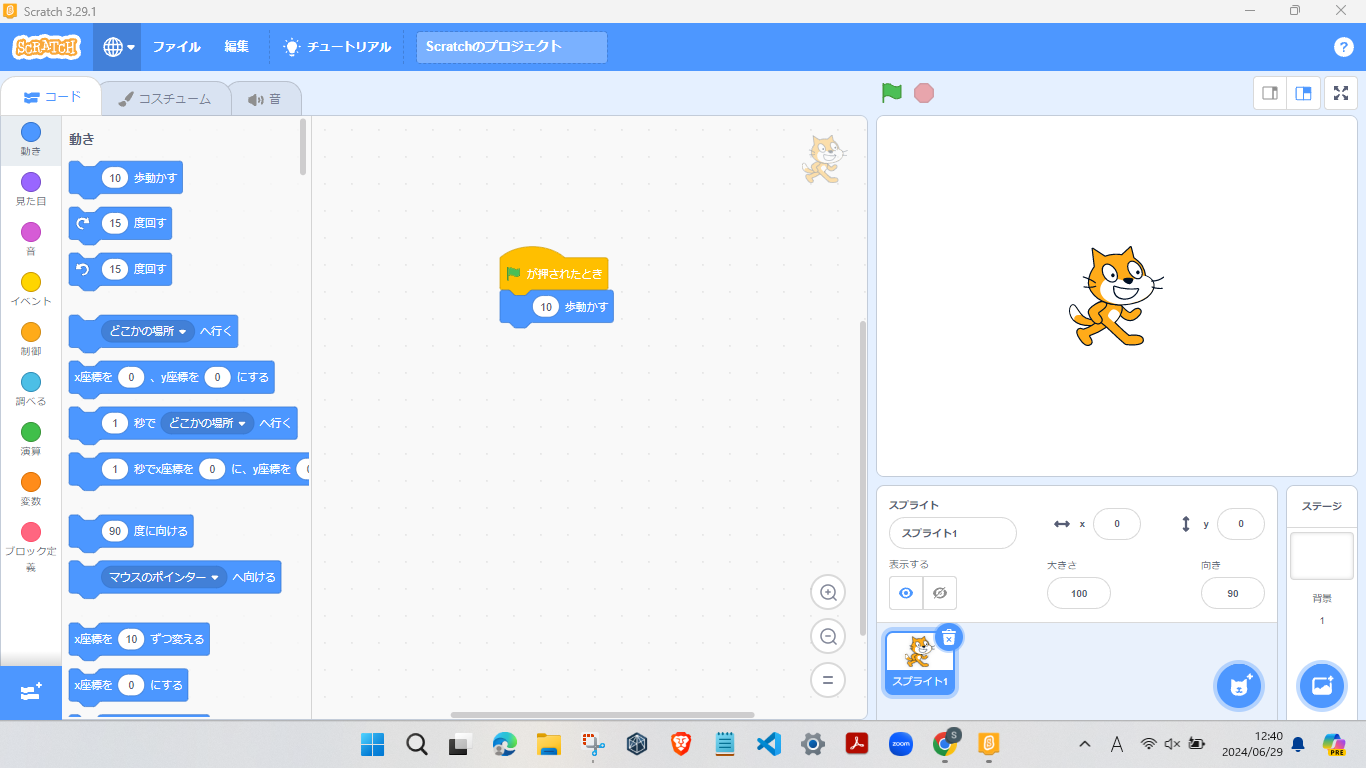
PCにScratchがインストールされていれば、ダウンロードしたファイルを開くことで自動でScratchが立ち上がり解答コードが表示されます。
中学生向け(Python)
各練習問題の解答のコードです。
コピーして利用してください。
初級編-Q1
import time from djitellopy import Tello tello = Tello() tello.connect() tello.takeoff() time.sleep(5) tello.move_forward(100) time.sleep(5) tello.land()
初級編-Q2
from djitellopy import Tello
tello = Tello()
tello.connect()
tello.enable_mission_pads()
tello.takeoff()
pad = tello.get_mission_pad_id()
while pad != 1:
tello.move_forward(30)
pad = tello.get_mission_pad_id()
tello.flip_back()
tello.disable_mission_pads()
tello.land()
上級編-Q1
import time
from djitellopy import Tello
tello = Tello()
tello.connect()
tello.enable_mission_pads()
tello.takeoff()
pad = tello.get_mission_pad_id()
while pad != 2:
tello.move_forward(20)
pad = tello.get_mission_pad_id()
tello.go_xyz_speed_mid(0, 0, 30, 20, 2)
for i in range(3):
for j in range(2):
tello.curve_xyz_speed(50, 50, 5, 100, 0, 10, 20)
time.sleep(3)
tello.rotate_counter_clockwise(180)
time.sleep(3)
Z = tello.get_mission_pad_distance_z()
tello.go_xyz_speed_mid(0, 0, Z, 20, 2)
tello.go_xyz_speed_mid(0, 0, 50, 20, 2)
while pad != 1:
tello.move_back(20)
pad = tello.get_mission_pad_id()
tello.go_xyz_speed_mid(0, 0, 50, 20, 1)
tello.land()
tello.disable_mission_pads()
tello.end()
中級編-Q1
import time from djitellopy import Tello tello = Tello() tello.connect() tello.takeoff() time.sleep(5) tello.move_forward(100) time.sleep(5) tello.land() time.sleep(5) tello.takeoff() time.sleep(5) tello.rotate_clockwise(180) time.sleep(5) tello.move_forward(100) time.sleep(5) tello.move_back(100) time.sleep(5) tello.land() tello.end()
中級編-Q2
import time
from djitellopy import Tello
tello = Tello()
tello.connect()
tello.enable_mission_pads()
tello.takeoff()
pad= tello.get_mission_pad_id()
while pad != 2:
tello.move_forward(30)
pad = tello.get_mission_pad_id()
tello.go_xyz_speed_mid(0, 0, 50, 20, 2)
tello.land()
time.sleep(5)
tello.takeoff()
tello.rotate_clockwise(180)
while pad != 1:
tello.move_forward(30)
pad = tello.get_mission_pad_id()
time.sleep(5)
while pad != 2:
tello.move_back(30)
pad = tello.get_mission_pad_id()
time.sleep(5)
tello.go_xyz_speed_mid(0, 0, 50, 20, 2)
tello.land()
tello.end()
Q1
import time from djitellopy import Tello tello = Tello() tello.connect() tello.takeoff() time.sleep(5) tello.move_forward(100) time.sleep(5) tello.land() time.sleep(5) tello.takeoff() time.sleep(5) tello.rotate_clockwise(180) time.sleep(5) tello.move_forward(100) time.sleep(5) tello.move_back(100) time.sleep(5) tello.land()